Parametric curves
Videos, Organic Chemistry Tutor
01 Theory
Parametric curves are curves traced by the path of a ‘moving’ point. An independent parameter, such as
Parametric curve
A parametric curve is a function from parameter space
to the plane given in terms of coordinate functions:
Other notations
Be aware that sometimes the coordinate functions are written with
and (or yet other letters) like this: Or simply equating coordinate letters with functions:
Sometimes a different parameter is used, like
or .
For example, suppose:
The curve traced out is a parabola that opens horizontally:
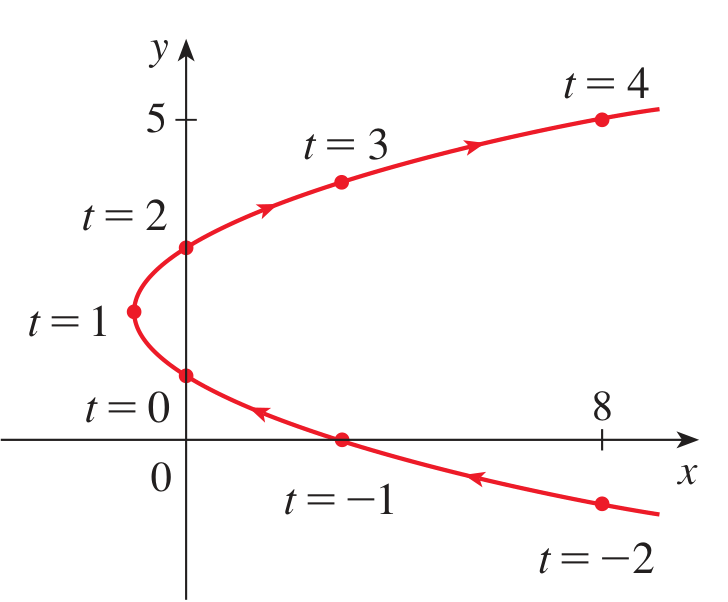
Given a parametric curve, we can create an equation satisfied by
In the example:
This is the equation of a parabola centered at
Image of a parametric curve
The image of a parametric curve is the set of output points
that are traversed by the moving point.
A parametric curve has hidden information that isn’t contained in the image:
- The time values
when the moving point is found in various locations. - The speed at which the curve is traversed.
- The direction in which the curve is traversed.
We can reparametrize a parametric curve to use a different parameter or different coordinate functions while leaving the image unchanged.
In the previous example, shift
Since the parameter
02 Illustration
Example - Parametric circles
Parametric circles
The standard equation of a circle of radius
centered at the point : This equation says that the distance from a point
on the circle to the center point equals . This fact defines the circle. Parametric coordinates for the circle:
For example, the unit circle
Link to originalis parametrized by and .
Example - Parametric lines
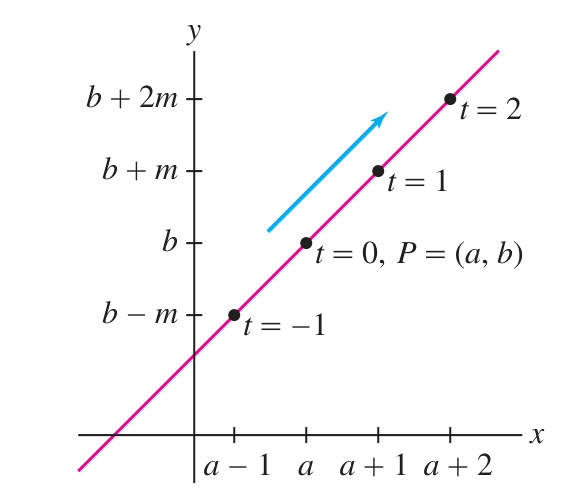
Parametric lines
Parametric coordinate functions for a line:
Compare this to the graph of linear function:
Vertical lines cannot be described as the graph of a function. We must use
.
Parametric lines can describe all lines equally well, including horizontal and vertical lines.
A vertical line
is achieved by setting and . A horizontal line
is achieved by setting and . A non-vertical line
may be achieved by setting and , and .
Assuming that
, the parametric coordinate functions describe a line satisfying: and therefore the slope is
and the -intercept is .
The point-slope construction of a line has a parametric analogue:
Link to original
Example - Parametric ellipses
Parametric ellipses
The general equation of an ellipse centered at
with half-axes and is: This equation represents a stretched unit circle:
- by
in the -axis - by
in the -axis Parametric coordinate functions for the general ellipse:
Link to original
Example - Parametric cycloids
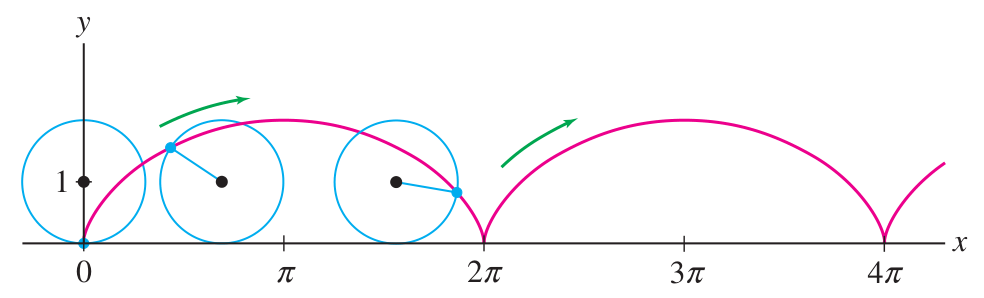
Parametric cycloids
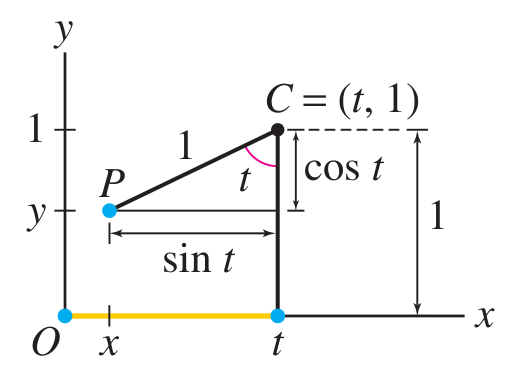
The cycloid is the curve traced by a pen attached to the rim of a wheel as it rolls.
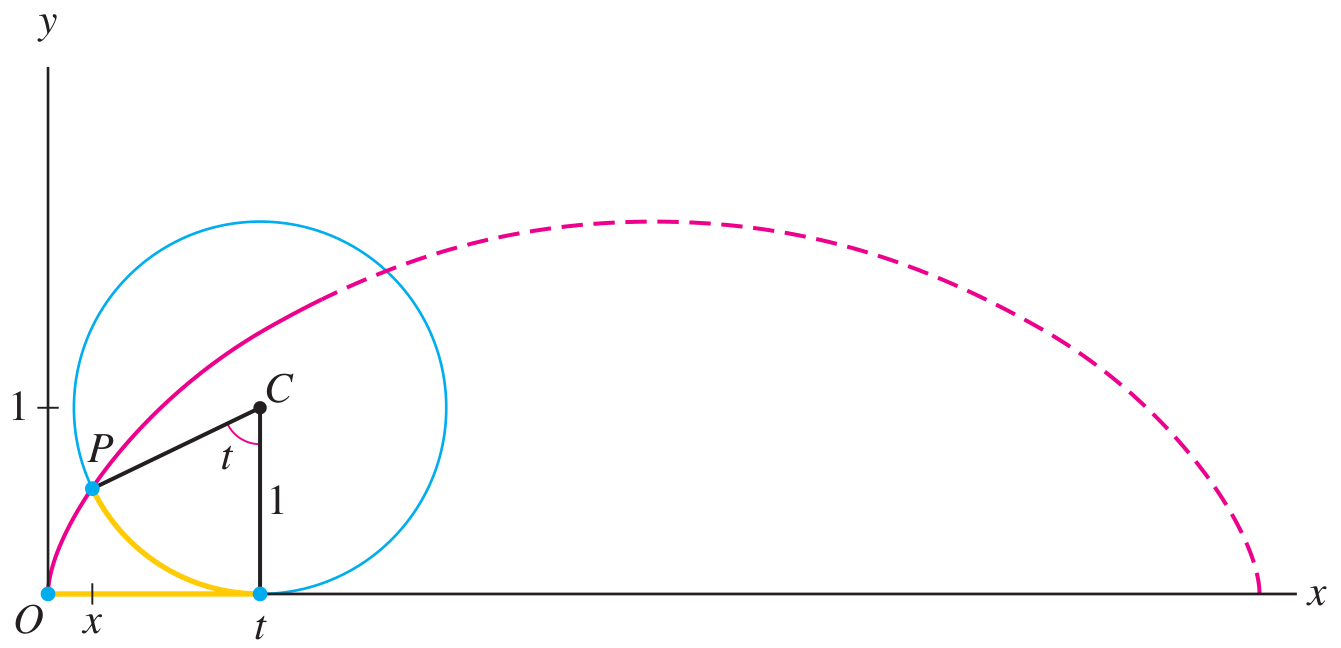
It is easy to describe the cycloid parametrically. Consider the geometry of the situation:
The center
of the wheel is moving rightwards at a constant speed of , so its position is . The angle is revolving at the same constant rate of (in radians) because the radius is . The triangle shown has base
, so the coordinate is . The coordinate is . So the coordinates of the point
are given parametrically by: If the circle has another radius, say
, then the parametric formulas change to: Link to original
Calculus with parametric curves
03 Theory - Slope, concavity
We can use
Slope formula
Given a parametric curve
, its slope satisfies:
Concavity formula
Given a parametric curve
, its concavity satisfies the formula:
Extra - Derivation of slope and concavity formulas
For both derivations, it is necessary to view
as a function of through the inverse parameter function. For example if is the parametrization, then is the inverse parameter function. We will need the derivative
in terms of . For this we use the formula for derivative of inverse functions: Given all this, both formulas are simple applications of the chain rule.
For the slope:
For the concavity:
(In the second step we inserted the formula for
from the slope.)
Pure vertical, Pure horizontal movement
In view of the formula
, we see:
- Pure vertical: when
and yet - Pure horizontal: when
and yet
When
04 Illustration
Example - Tangent to a cycloid
Tangent to a cycloid
Find the tangent line (described parametrically) to the cycloid
when . Solution
Compute
and . Find
: Find
:
Plug in
: Plug in
:
Apply formula:
: Calculate
at : Simplify:
So:
This is the slope
for our line.
Need the point
for our line. Find at . Plug
into parametric formulas:
Point-slope formulation of tangent line:
Inserting our data:
Link to original
Example - Vertical and horizontal tangents of the circle
Vertical and horizontal tangents of the circle
Consider the circle parametrized by
and . Find the points where the tangent lines are vertical or horizontal. Solution
For the points with vertical tangent line, we find where the moving point has
(purely vertical motion): The moving point is at
when , and at when .
For the points with horizontal tangent line, we find where the moving point has
(purely horizontal motion): The moving point is at
Link to originalwhen , and at when .
Example - Finding the point with specified slope
Finding the point with specified slope
Consider the parametric curve given by
. Find the point where the slope of the tangent line to this curve equals 5. Solution
Compute the derivatives:
Therefore the slope of the tangent line, in terms of
:
Set up equation:
Solve. Obtain
.
Find the point:
Link to original
05 Theory - Arclength
Arclength formula
The arclength of a parametric curve with coordinate functions
and is: This formula assumes the curve is traversed one time as
increases from to .
Counts total traversal
This formula applies when the curve image is traversed one time by the moving point.
Sometimes a parametric curve traverses its image with repetitions. The arclength formula would add length from each repetition!
Extra - Derivation of arclength formula
The arclength of a parametric curve is calculated by integrating the infinitesimal arc element:
In order to integrate
in the variable, as we must for parametric curves, we convert to a function of : So we obtain
and the arclength formula follows from this:
06 Illustration
Example - Perimeter of a circles
Perimeter of a circle
The perimeter of the circle
is easily found. We have , and therefore:
Integrate around the circle:
Link to original
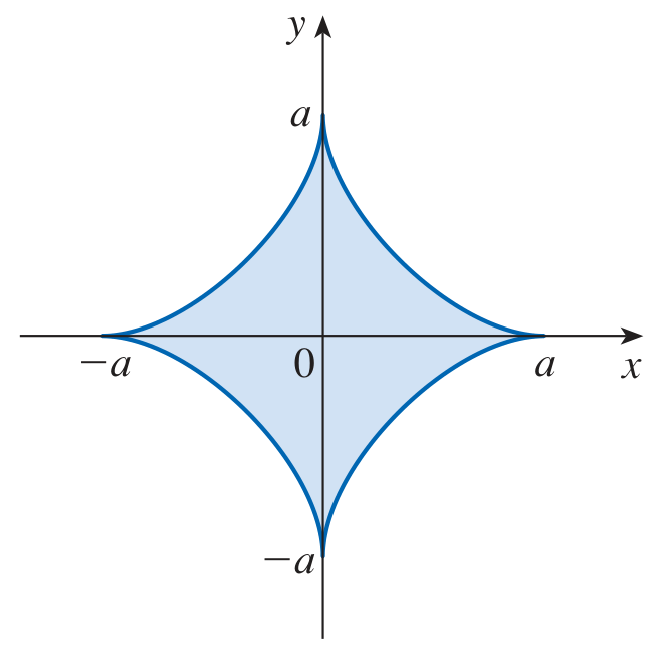
Example - Perimeter of an asteroid
Perimeter of an asteroid
Find the perimeter length of the ‘asteroid’ given parametrically by
for .
Solution
Notice: Throughout this problem we use the parameter
instead of . This does not mean we are using polar coordinates! Compute the derivatives in
:
Compute the infinitesimal arc element.
Plug into the arc element, simplify:
Bounds of integration?
Easiest to use
. This covers one edge of the asteroid. Then multiply by 4 for the final answer. On the interval
, the factor is positive. So we can drop the absolute value and integrate directly. Absolute values matter!
If we tried to integrate on the whole range
, then really does change sign. To perform integration properly with these absolute values, we’d need to convert to a piecewise function by adding appropriate minus signs.
Integrate the arc element:
Finally, multiply by 4 to get the total perimeter:
Link to original
07 Theory - Distance, speed
Distance function
The distance function
returns the total distance traveled by the particle from a chosen starting time up to the (input) time :
We need the dummy variable
Speed function
The speed of a moving particle is the rate of change of distance:
This formula can be explained in either of two ways:
- Apply the Fundamental Theorem of Calculus to the integral formula for
. - Consider
for a small change : so the rate of change of arclength is , in other words .
08 Illustration
Example - Speed, distance, displacement
Speed, distance, displacement
The parametric curve
describes the position of a moving particle ( measuring seconds). (a) What is the speed function? Suppose the particle travels for
seconds starting at . (b) What is the total distance traveled? (c) What is the total displacement? Solution
(a) Compute derivatives:
Now compute the speed.
Find sum of squares:
Get the speed function:
(b) Distance traveled by using speed. Compute total distance traveled function:
Integrate.
Substitute
and . New bounds are
and . Calculate:
Insert
for the answer. The distance traveled up to
is: This is our final answer.
(c)
Displacement formula:
Pythagorean formula for distance between given points.
Compute starting and ending points.
For starting point, insert
: For ending point, insert
:
Plug points into distance formula.
Insert
and : This is our final answer.
Link to original
09 Theory - Surface area of revolutions
Surface area of a surface of revolution: thin bands
Suppose a parametric curve
is revolved around the -axis or the -axis. The surface area is:
The radius
should be the distance to the axis:
This formulas adds the areas of thin bands, but the bands are demarcated using parametric functions instead of input values of a graphed function.
The formula assumes that the curve is traversed one time as
10 Illustration
Example - Surface of revolution - parametric circle
Surface of revolution - parametric circle
By revolving the unit upper semicircle about the
-axis, we can compute the surface area of the unit sphere. The parametrization of the unit upper semicircle is:
. The derivative is:
.
Therefore, the arc element:
Now for
we choose because we are revolving about the -axis. Plugging all this into the integral formula and evaluating gives:
Notice: This method is a little easier than the method using the graph
Link to original.
Example - Surface of revolution - parametric curve
Surface of revolution - parametric curve
Set up the integral which computes the surface area of the surface generated by revolving about the
-axis the curve for . Solution
For revolution about the
-axis, we set . Then compute
: Therefore the desired integral is:
Link to original