Manifolds cont’d
01 Theory - Local coordinates
Smooth map
A map for open sets and is smooth when all partial derivatives of all orders exist and are continuous.
A map is a diffeomorphism when it is a homeomorphism and both and are smooth.
Suppose we have a smooth map for open, , and we know is injective and has maximal rank for all .
Then the Inverse Function Theorem from multivariable real analysis implies that is also a smooth map from to .
Therefore the parametrizations (charts) of a smooth manifold are diffeomorphisms.
Local coordinates
Given a coordinate chart for a smooth manifold , the coordinates of the images of the inverse provide local coordinates on .
02 Illustration
Smooth injection but not smooth
Let given by . Clearly is infinitely differentiable and injective.
Notice . So the differential does not have maximal rank at .
The inverse function is not smooth, indeed it is not differentiable at .
Circle requires two charts
Show that it is not possible to cover the unit circle with a single coordinate chart.
Solution
Suppose the contrary, that for is a coordinate chart covering .
(We assume this means is connected.)
Let be some point. Set .
- Then is connected.
- Therefore is connected since is a homeomorphism.
Set .
- Then .
- is disconnected: the open sets and separate .
- So is disconnected and connected, a contradiction.
Morse theory
03 Theory - Gradient, critical points; Hessian, non-degenerate points
Suppose we are given a smooth function .
The differential matrix of in this case is (the transpose of) the gradient of :
By the definition of regular point, a point is regular for when the gradient vector is not , i.e. when for some coordinate . The point is called critical when it is not regular.
(Note: is smooth by hypothesis, so the components of are everywhere defined, and so critical points are points where .)
The differential of a smooth function is itself a smooth function . We may thus take the differential of the differential, and we obtain the Hessian matrix of second partial derivatives:
The Hessian matrix is always a symmetric square matrix because . This implies that all eigenvalues are real numbers (a case of the Spectral Theorem).
Non-degenerate critical point
A critical point for a function is non-degenerate when is a non-singular matrix.
Equivalently, when:
- All eigenvalues of are nonzero
Index of a critical point
Given a non-degenerate critical point , the index of is the number of negative eigenvalues of .
Isolated critical point
A critical point for a function is isolated when an open neighborhood of can be found such that is the only critical point of in this neighborhood.
04 Illustration
Same critical point, different index
Consider these functions from to :
The point is the only critical point for each of these functions.
The Hessian matrices at are:
So has index for , index for , and index for .
05 Theory - Morse functions on manifolds
Morse theory is about the use of a function to study the topology of the manifold in terms of the critical points of . One sets up a function that has nondegenerate critical points with distinct critical values, called a Morse function. To make sense of this setup we need first to define smooth functions .
Smooth function on a manifold
A function on a smooth manifold is smooth if it is the restriction of a smooth function where is an open set in with .
This means: and has continuous partial derivatives of all orders.
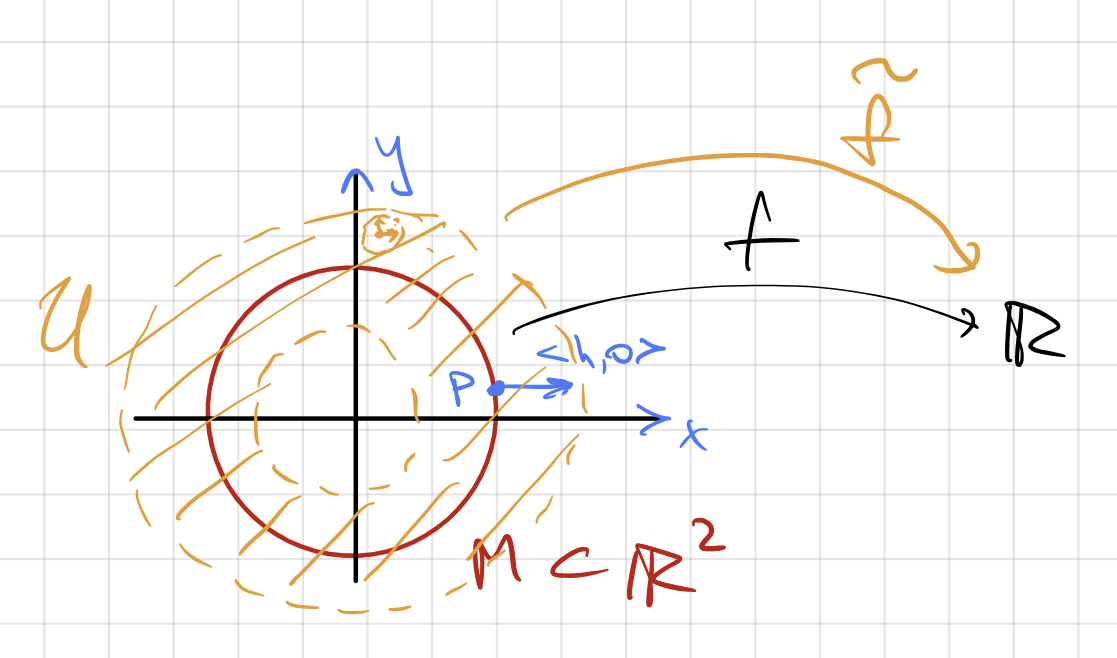
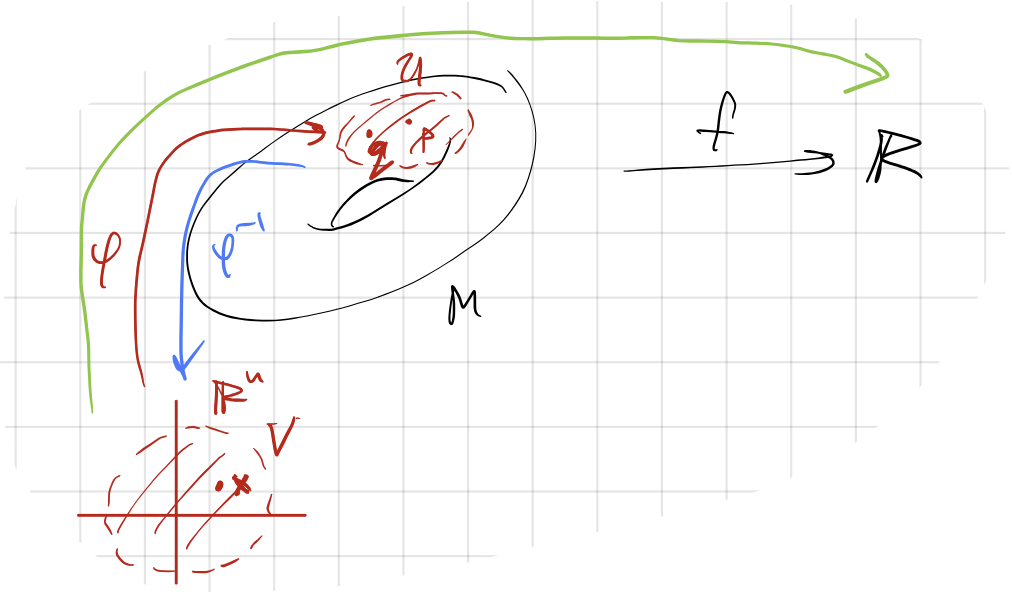
Recall local coordinates: For any there is a set open in and open in with
a parametrization (diffeomorphism to its image). The -coordinates of images of the inverse give local coordinates on .
Critical and non-degenerate, from a manifold
Let be a smooth function on a smooth -manifold in , and a parametrization of the open neighborhood of . So for .
Choose any . Set .
We say or is regular when and critical when .
We say or is non-degenerate when is a non-singular matrix (and degenerate otherwise).
Notice that this definition of regularity appears to depend on the parametrization . But in fact, the definition is independent of the choice of :
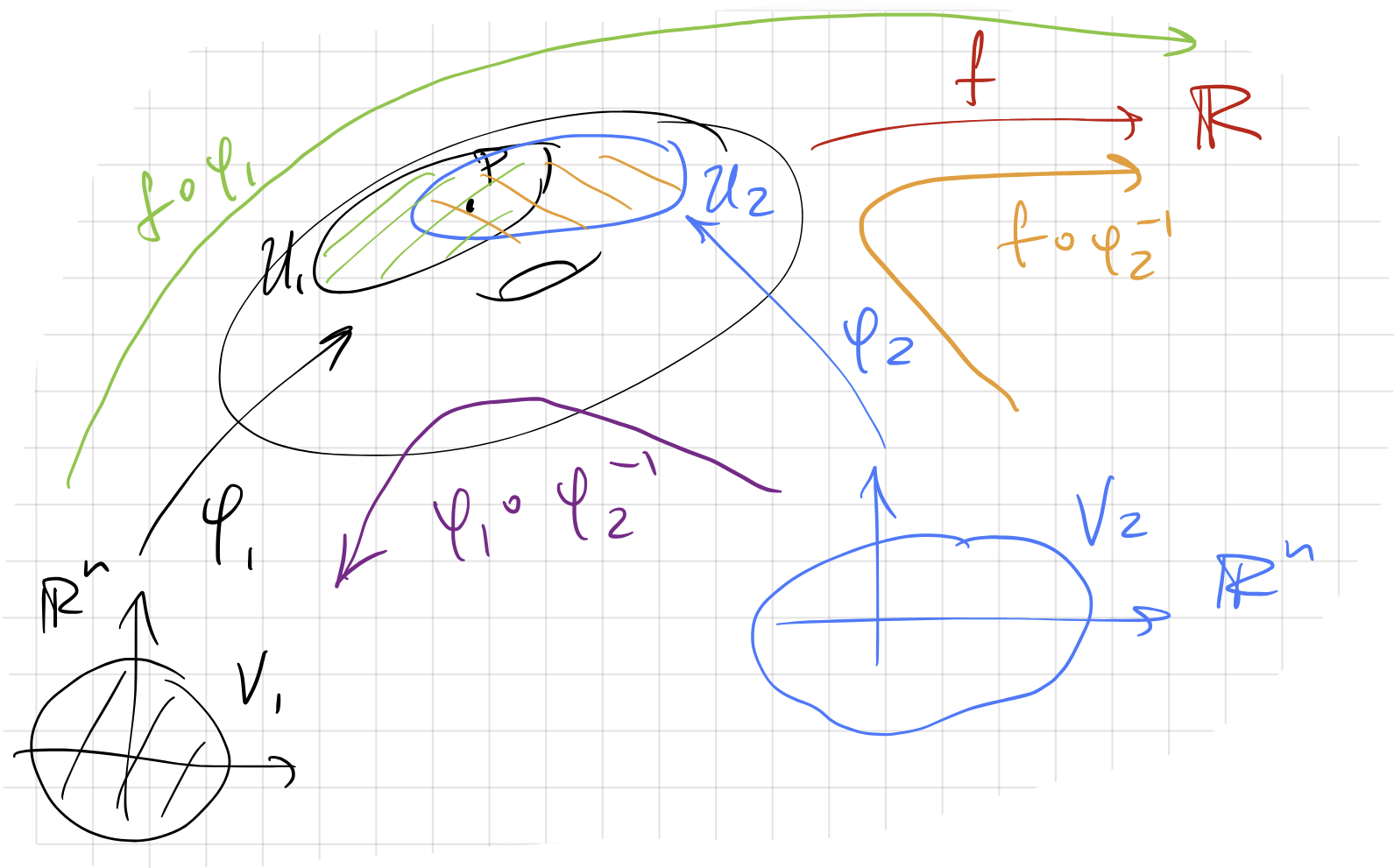
Proposition - Regularity is independent of parametrization
Suppose we are given two parametrizations and of a coordinate patch .
Take an arbitrary and assume it is regular according to .
We show it must be regular according to .
This will complete the proof because if it is critical according to , and not critical according to , then it is regular according to , and the same argument can be run after switching .
Define the ‘transition map’ .
This is a map where and for open balls.
Notice that .
Apply chain rule:
Here is the Jacobi matrix of .
Argue that is invertible:
We have that and are both isomorphisms from to the tangent space of at .
Then is the composition of with the inverse of restricted to the tangent space of at . (Prior to restriction is not even a square matrix.)
Therefore is invertible.
Therefore, at any point:
So a point is regular for if and only if it is regular for .
Why define regularity using parametrizations?
Since the choice of parametrization has no effect on the classification of points as regular or critical, one may wonder why the parametrization is needed at all.
But the concept of regularity does involve the manifold’s embedding, and not just the values of in the ambient space around the manifold.
A point is regular for when there is some first-order infinitesimal deviation of within which causes a first-order deviation in . When is critical, the induced change in is second order at most.
For example, given a smooth function , a level surface is (frequently) an -manifold every point of which is regular for , but no point of which is regular for .
Tangent space
Given a manifold , we define the tangent space to at , written , as the image of in for any parametrization of a neighborhood of .
Comparing gradient functions
Notice:
- is a map from , and has coordinates
- is a map from , and has coordinates, one for each dimension of
In general: is the restriction of to using columns of as a basis.
(Supposing and an extension of to with .)
Morse Lemma
Suppose is a non-degenerate critical point of index of a smooth function .
Then:
for some parametrization whose local coordinates are .
Morse functions
A Morse function is a smooth function from a manifold to which satisfies:
- All critical points of are non-degenerate.
- The values of at its critical points are all distinct.
Morse functions are dense
Morse functions are dense in the space of smooth functions.
There is a small perturbation of any smooth function that is a Morse function.
06 Illustration
Height function
Suppose by .
Then . Since is the restriction of to , we see that is critical for precisely when is normal to .
In other words: critical points of are points where the tangent space to is a horizontal plane.
This reasoning generalizes to higher dimensions where one dimension is chosen as ‘vertical’, and horizontal planes become hypersurfaces normal to the vertical unit vector.
07 Theory - Morse functions and topology
Given a Morse function for a manifold , define:
- the level set at
- the sublevel set under
By continuously increasing the value of (starting at ), we find that the topology of changes exactly when passes a critical point of .
Sublevel set builds topology
Up to homotopy equivalence, as passes through a critical point of index , the sublevel set changes by the attachment of a -ball along its boundary.
For example:
- Pass a point of index glue on a disk, a lid opening downwards
- Pass a point of index glue on an arc (up to homotopy)
- Pass a point of index create a new disk, a basket opening upwards
08 Illustration
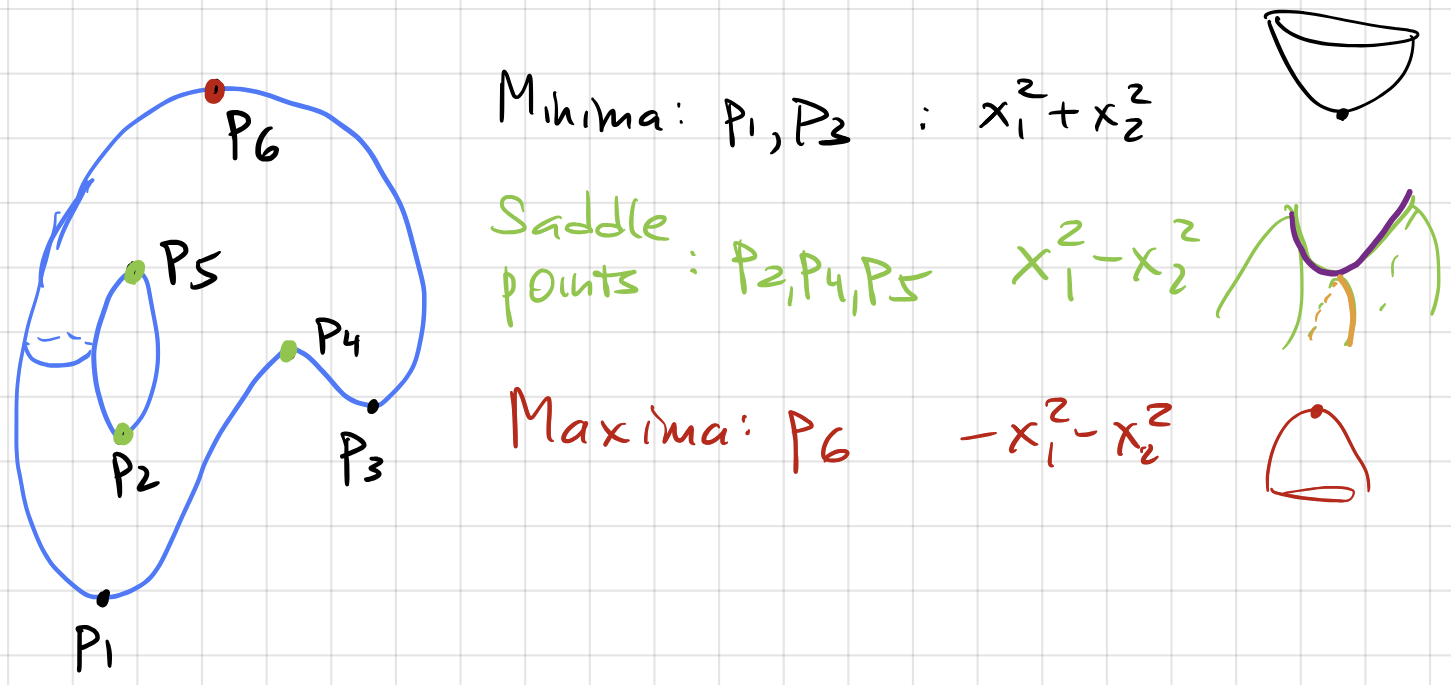
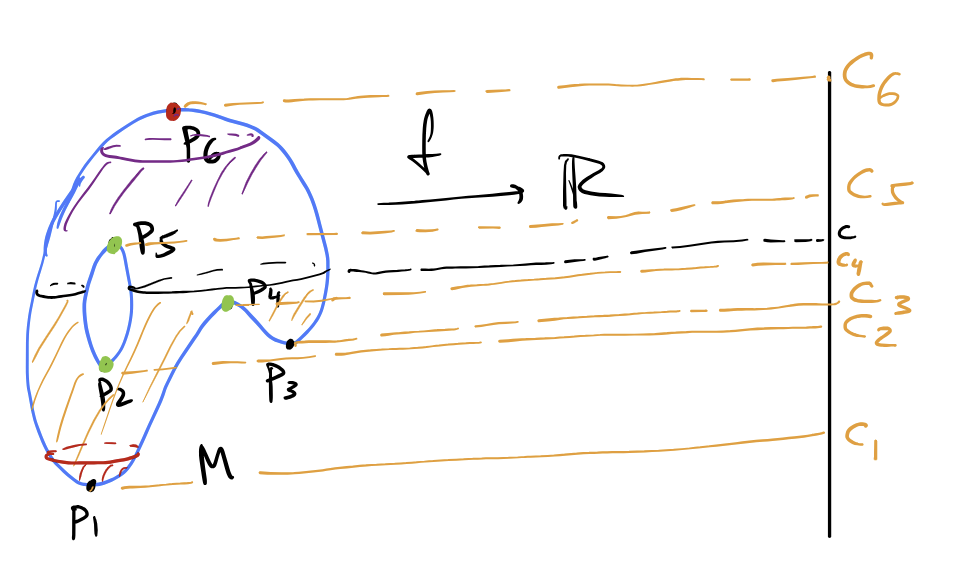
Height function on a torus
Suppose is the height function , and is topologically a torus, though not geometrically.
As passes through , a small disk is created in .
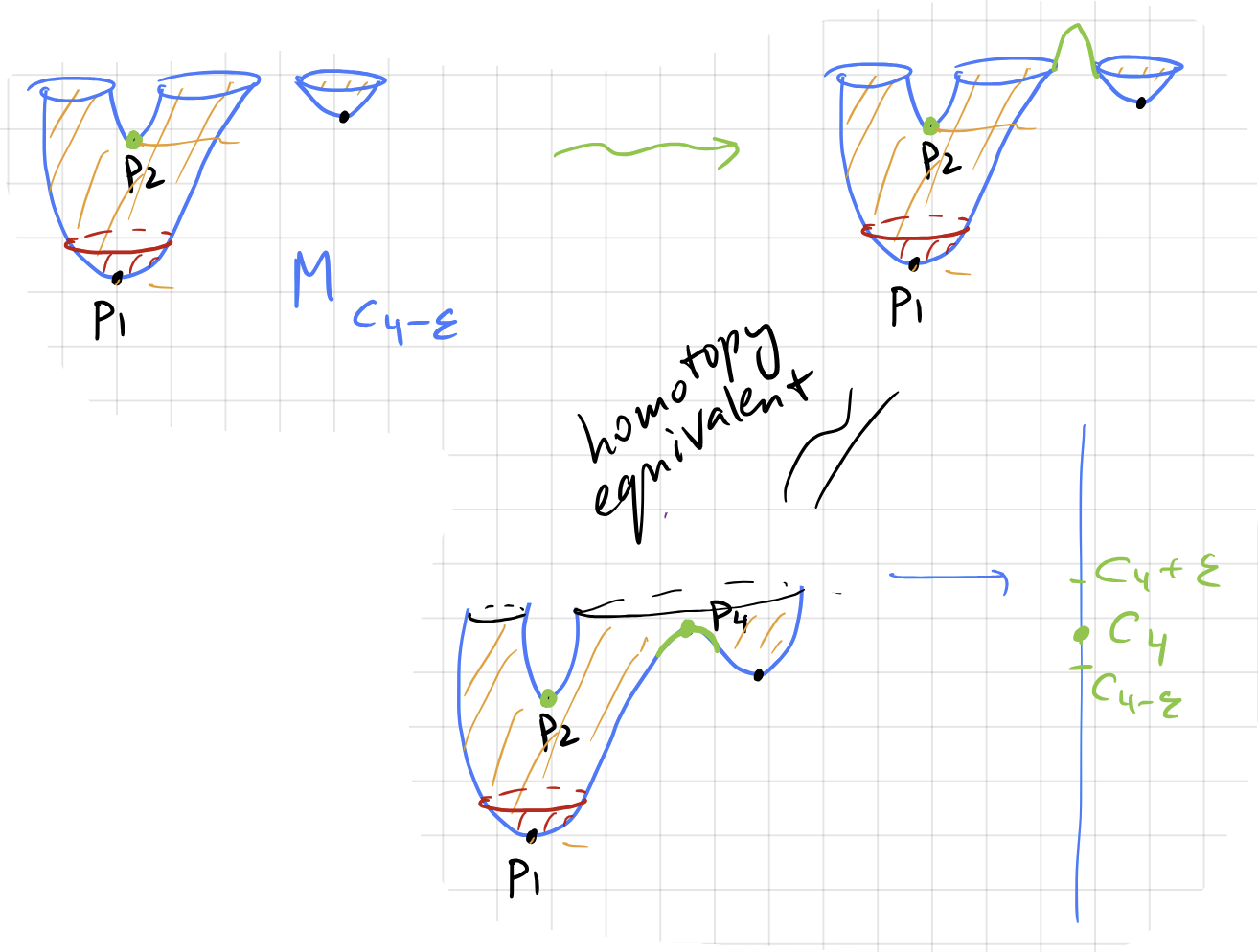
Passing through is (up to homotopy) equivalent to adding a handle to the basket below :
Passing through adds a new basket, and passing through adds a handle connecting the basket:
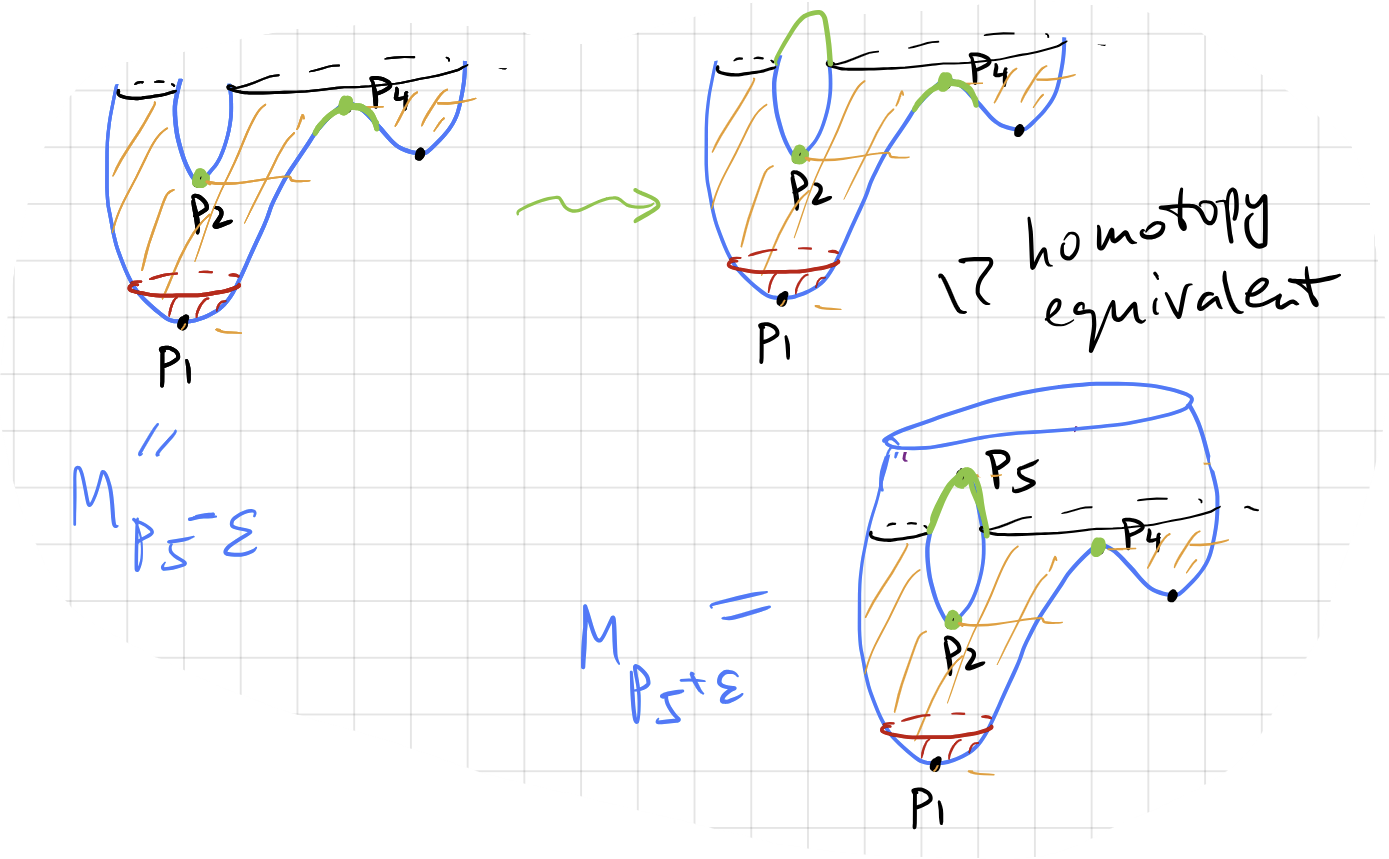
Passing through adds a handle creating a loop:

Structures from point-cloud data
09 Theory - Gromov-Hausdorff distance
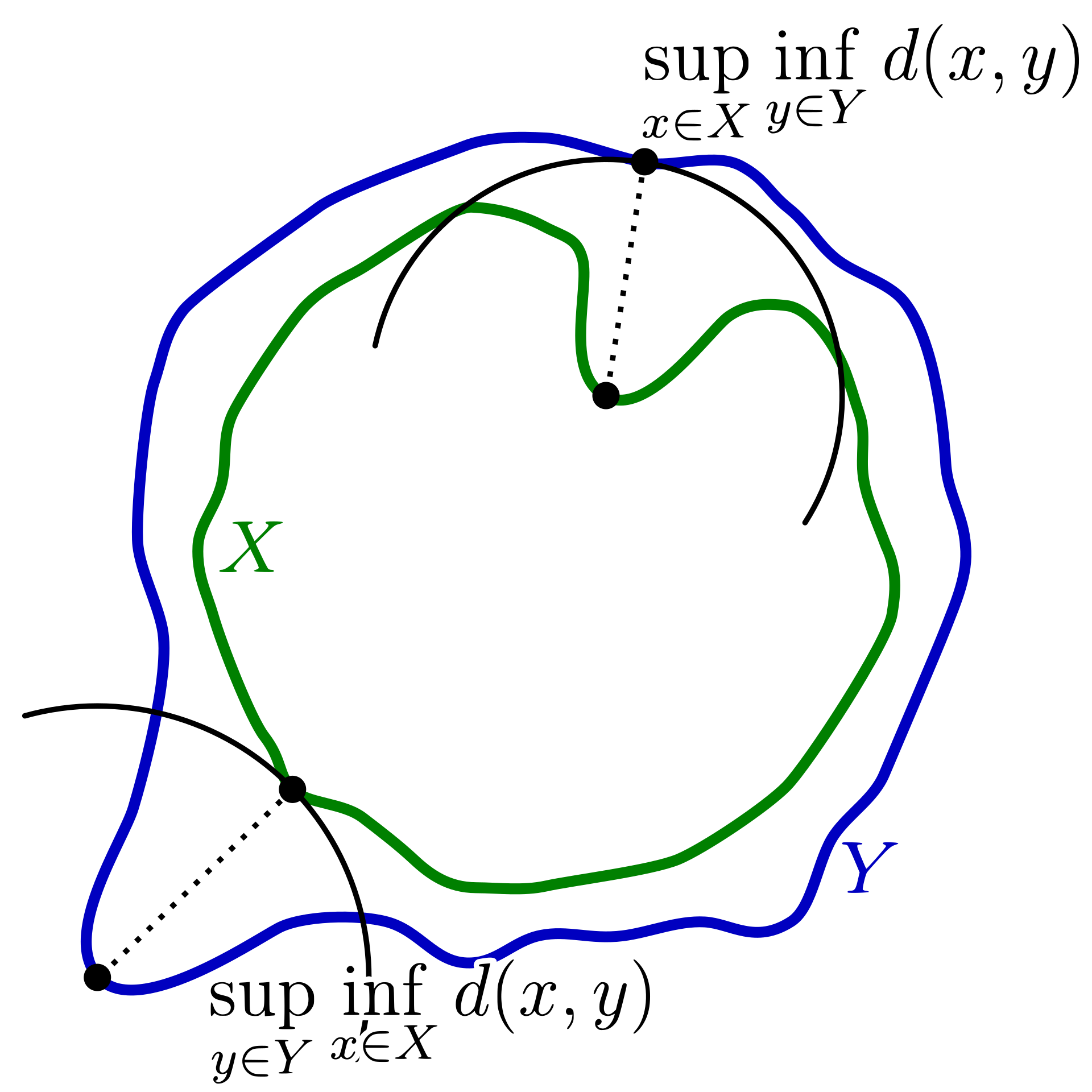
Hausdorff distance
Suppose and are subsets of a metric space .
The Hausdorff distance is:
Here:
- smallest distance to
- smallest distance to
Therefore:
- within , how far away can you get from ?
- within , how far away can you get from ?

Gromov-Hausdorff distance
Suppose and are compact metric spaces and is some fixed compact metric space.
The Gromov-Hausdorff (GH) distance is:
where , are isometric embeddings of , into .
Notice that this definition is relative to .
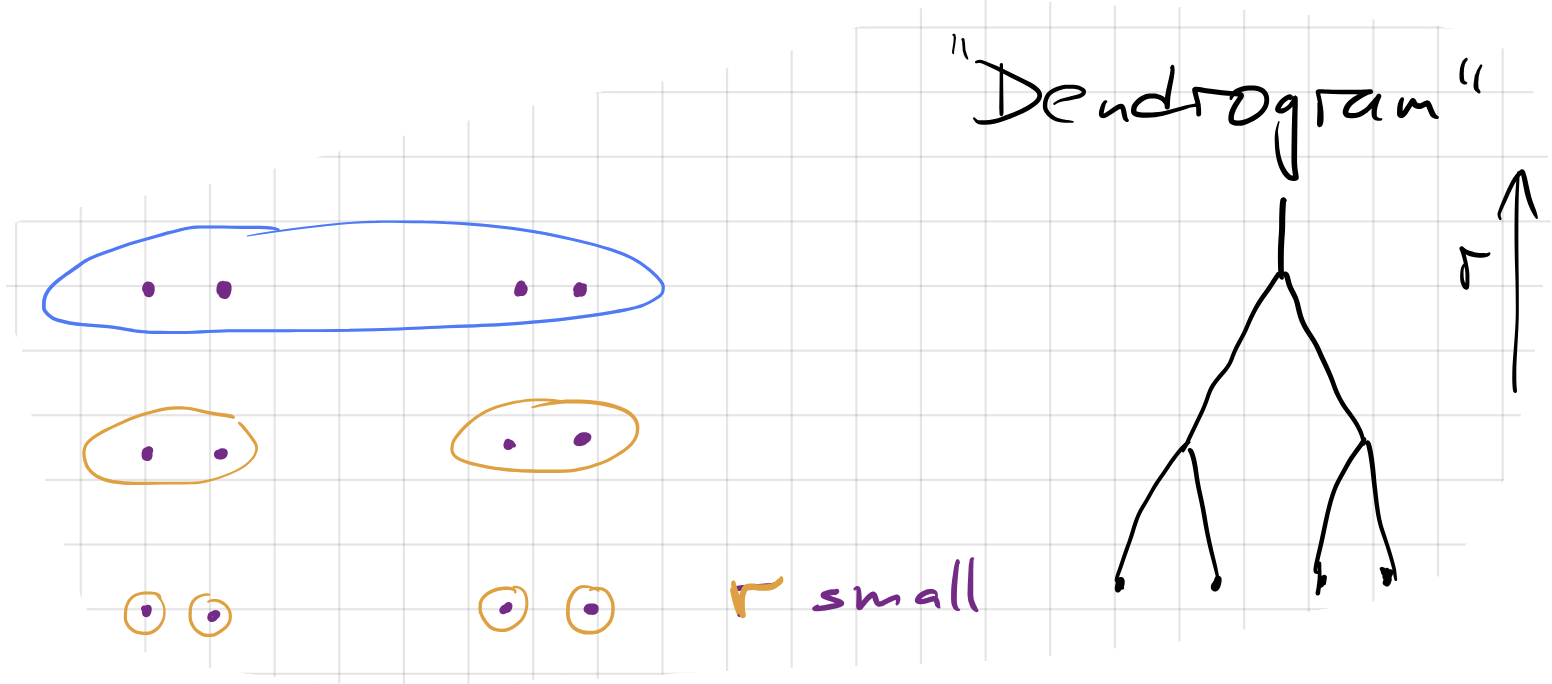
10 Theory - Dendrogram
Persistent homology describes the clustering of point-cloud data.
The GH distance frequently serves as a pure math benchmark. Given finite sets of points , the distance is a measure of similarity of the shape of the point clouds and .
The GH distance cannot be computed efficiently (if at all), so other measures of similarity for point clouds are useful.
Desiderata for measures of point-cloud similarity:
- Quantifies topological and geometric features
- Distinguishes features from noise
- Is computable
- Recognizes when features are close in the GH metric
Suppose we have a finite set of points for a metric space .
Fix . Define a relation when .
Let be the transitive closure of . This is an equivalence relation (generated by ) which partitions into equivalence classes. Members of each equivalence class can be obtained from one another by a sequence of “hops” between points no more than apart.
Draw a tree diagram with a junction at each where distinct clusters are joined:
11 Theory - Filtrations
Filtered simplicial complex
A filtered simplicial complex is a complex with a collection:
where each is a simplicial complex which is a subcomplex of .
(The vertices and simplices of a subcomplex must be vertices and simplices in the supercomplex.)
Filtered space
A filtered topological space is a collection of spaces indexed by with continuous maps:
and these maps satisfy a transitivity compatibility:
It is sometimes convenient, if a little ungainly, to consider a filtered simplicial complex as a filtered space where is a simplicial subcomplex of whenever . Such a filtered space changes only at discrete values of .
12 Illustration
Čech complex as filtered complex
Let be a finite set of points in a metric space .
Recall that the Čech complex of , written for , is the nerve complex of the collection of open balls .
In other words, is the complex with vertices the points of , and -simplices the subsets with points whose -balls have nonempty mutual intersection.
This is a filtered complex because whenever . Once in, always in, for a simplex.

13 Theory - Vietoris-Rips complex
Vietoris-Rips complex
Let be a finite set of points in a metric space .
The Vietoris-Rips complex is the complex whose vertices are the points , and whose -simplices are those subsets with points all of which are pairwise less than apart:
The VR complex is a filtered space (filtered complex) because:
Notice that the VR complex and the Čech complex include the same 1-simplices: a simplex is in the VR complex if , and in the Čech complex if . These conditions are equivalent, at least in .
Pairwise vs. mutual intersection
- The VR complex includes simplices for points which pairwise intersect.
- The Čech complex includes simplices for points which mutually intersect.
For example:

The three blue circles all intersect pairwise, so is in the VR complex, but they don’t mutually intersect so this simplex is not in the Čech complex.
On the other hand, the four green circles do not intersect pairwise. The VR complex and the Čech complex are the same in this case.
VR complex computability
Since the VR complex depends only on the data of pairwise distances between points, it is very easy to compute.
Čech and VR containments
For any point cloud , we have:
- inclusion as subcomplex
- inclusion as subcomplex
The first is true because any mutual intersection implies the pairwise intersections.
The second is true because any pairwise intersection of balls implies that the balls extend to cover other centers. So the centers of all points are in the -balls of each of the others, thus the centers are in the mutual intersection.
14 Theory - Persistent homology, barcodes
Persistent homology
Let be a filtered simplicial complex.
Fix . For any , define:
Whenever there is a map and this induces linear maps on homology:
These satisfy .
The persistent homology of is the collection of vector spaces and linear maps .
Persistent homology is defined for any filtered simplicial complex. For example, we can take persistent homology of the Čech complex or of the Vietoris-Rips complex.
Persistent VR homology - Structure Theorem
Let for be the persistent homology of the VR complex of a point cloud .
Fix . Then has a canonical decomposition as a direct sum of persistence intervals:
Persistence interval
For any with and , define:
with (linear) filtration maps given by when .
15 Illustration
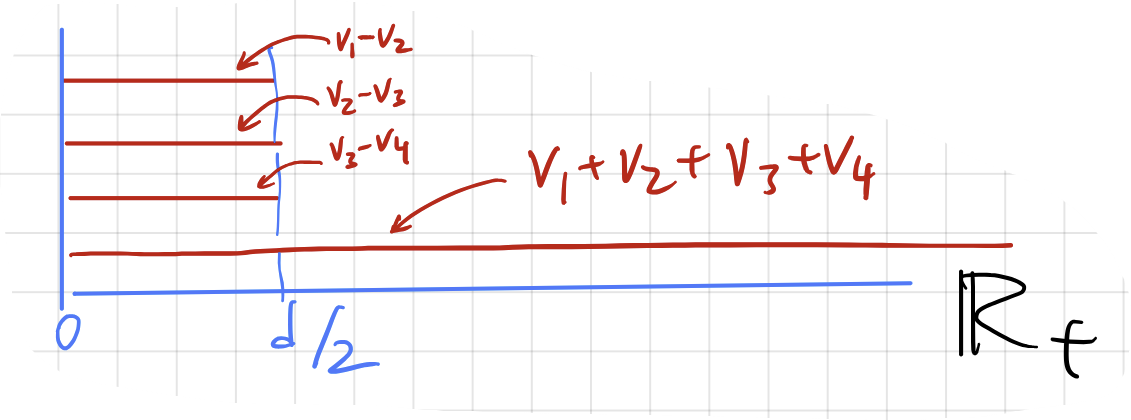
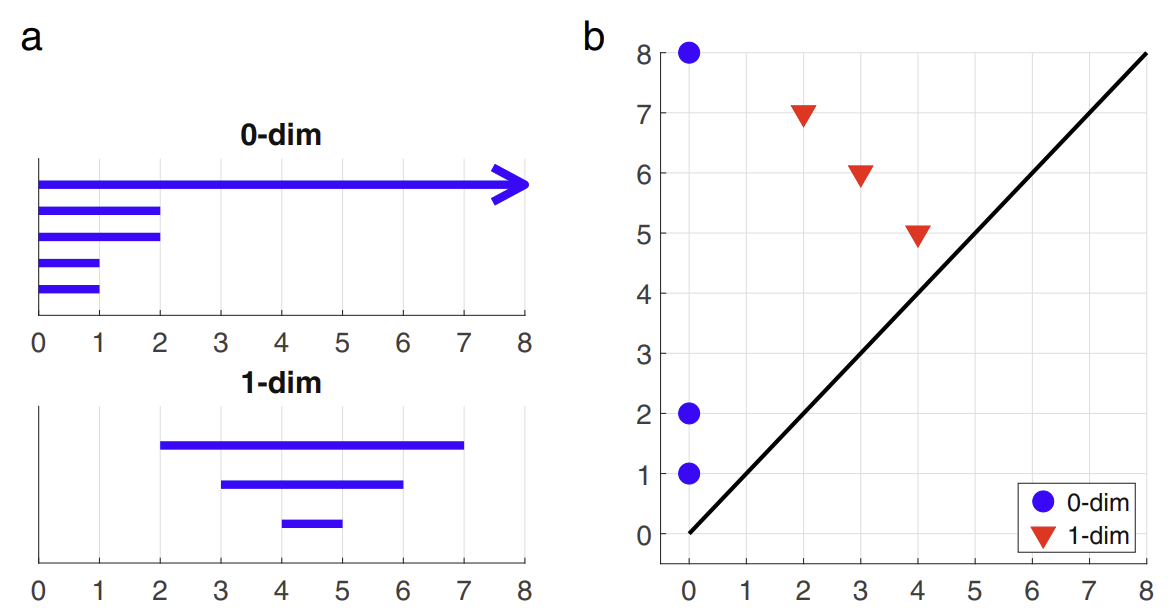
Barcode diagram:
- Each receives a horizontal bar starting at , ending at .
- Bar colored according to degree in
Persistence diagram:
- Each receives a dot placed at
- Horizontal ‘birth’ axis, vertical ‘death’ axis
- Dots colored according to degree in
Point cloud: square
Basis:
Decomposition:

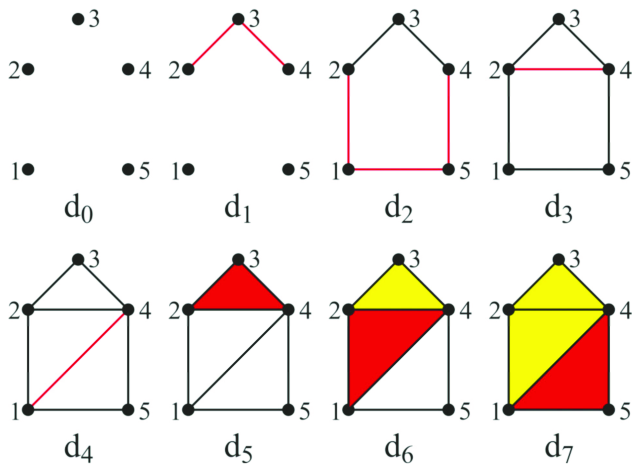
Filtered complex
Abstract filtration:
Barcode and persistence diagram:
16 Theory - Barcode basis
We would like to understand the direct sum decompositions like the one in the example of the point cloud square:
Understanding such a decomposition amounts to determining a basis of homology classes that have lifespans described by the persistence intervals.

We have:
A basis for is the equivalence class of all vectors in which are not in the span . For example, or or .
Barcode diagram for :

Now consider . Cycles in are generated by 1-simplices which are sets of two points that are apart.
Consider again the square point cloud:

For , we have .
For , we have .
For , we have 4 additional 2-simplices (all combinations of 3 points).
The square will the boundary of the difference of two of the 2-simplices (complementary triangles), so the homology class of the square vanishes when reaches .
Barcode diagram for :

Thus: