Vectors
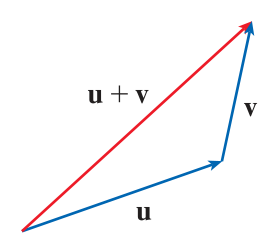
Vector space: addition and scaling
A vector is an element in a vector space, which is a collection of objects supporting addition and scalar coefficients.
Vector space operations
- is a vector when
- is a vector when
Properties of vector operations
- Commutativity:
- Associativity:
- Distributivity:
- Zero vector:
The elements also satisfy obvious properties like: and and
Scalars Scalars (“scal-ers”) could be taken in any field, but for this class, they are just real numbers .
Components of vectors
In this class we consider vectors in the plane and vectors in space .
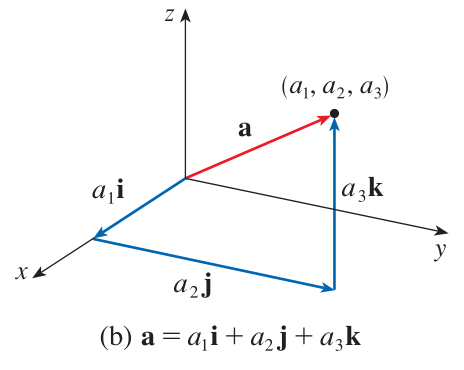
Vectors in the plane are ordered pairs with . Vectors in space are ordered triples with .
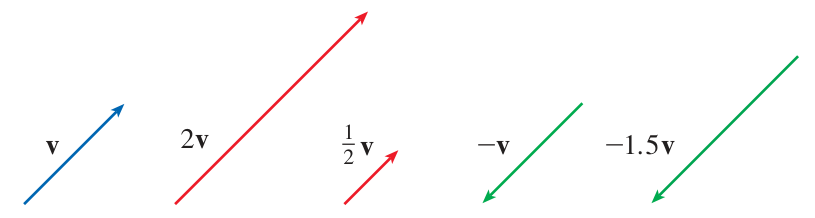
Addition is componentwise: Scalars act by components too: (Similarly for vectors in space.)
Standard basis vectors These special vectors have their own symbols:
Components Most often the word ‘component’ of a vector refers to one of the numbers in the ordered sequence or .
Sometimes ‘component’ refers to the basis vector scaled by this number, e.g. . Notice that we always have , which is the reason ‘component’ is sometimes used in this second way.
Other bases It is possible to select a different set of special vectors, e.g. , having the property that any vector can be written uniquely as a linear combination in the same way: . Any such set is called a basis, and the in this case are called components in the basis . This topic is considered further in Linear Algebra.
Coordinates Mathematicians say ‘components’ for the parts of a vector, and ‘coordinates’ for the quantities that are used to identify points of space. Since the spaces and are vector spaces, the tuples or actually give coordinates and vector components!
In more general curved spaces, points cannot be “added together,” so this relation between coordinates and components breaks down.
Geometric vectors
It is possible to consider vectors purely geometrically as the combined data of direction and magnitude in space. (Provided one has defined space purely geometrically, which nobody does.)
Products of vectors
Vector spaces often come with additional product operations between vectors.
Dot product
The vector space (any ) comes with an inner product, also called the dot product or scalar product. Every inner product satisfies basic rules: Algebraic properties
Component definition The dot products for and are defined using components:
Norm The dot product of a vector with itself gives a number called the (norm or length or magnitude) squared:
The terminology is justified by the Pythagorean Theorem in :
Exercise 03A-01
Parallelogram identity
Let and . Compute and and and . Show that:
Geometry The dot product scalar provides information about the geometric relationship of two vectors.
where is the angle between and . Proof: The rules for dot product imply that:
On the other hand, the Law of Cosines for the triangle with sides gives:
It is worth noticing that the norm determines the dot product:
The formula for has qualitative geometrical consequences:
- If then and are orthogonal (perpendicular)
- If then and form an acute angle
- If then and form an obtuse angle
- If then and are parallel
Exercise 03A-02
Angle between vectors
Find the angle between and .
Exercise 03A-03
Orthogonality by hand
Determine which pairs of and and are orthogonal.
Exercise 03A-04
Acute, orthogonal, or obtuse?
Are the angles between and and obtuse or acute?
Exercise 03A-05
Dot product via unit vectors
Compute the dot product of and .
Unit vectors A vector with is called a unit vector. For example, are unit vectors.
Thinking geometrically, a unit vector carries the information of direction. One could call them ‘direction vectors’ instead.
Any vector can be renormalized to create a new unit vector by dividing out its length: Some texts, especially in physics, use the notation for this unit vector .
Projection The dot product is a quantity telling how much one vector aligns with another. The dot product of two unit vectors is where is the angle between them.
One can use the dot product to find the components of a vector in the standard basis. Say is any vector. Then:
This is because .
More generally, one defines the projection of along (projection along the direction of ) using the dot product:
The scalar coefficient is called the parallel component of along . (Or, sometimes, is called the component.)
The projection points in the direction of , and it says how much of lies in that direction.
Another vector called the perpendicular component is given by subtracting the parallel part:
It is called ‘perpendicular’ because:
Exercise 03B-01
Projection by hand
Let and .
- (a) Find the projection of to the direction of .
- (b) Write the vector in terms of parts parallel and perpendicular to .
Cauchy-Schwarz inequality The Cauchy-Schwarz inequality says that for any vectors , , we know:
Exercise 03B-02
Cauchy-Schwarz
Prove the Cauchy-Schwarz inequality using the angle formula.
The Cauchy-Schwarz inequality is very important in math. There is a version of this inequality in many other settings where it is harder to prove.
Triangle inequality The Triangle inequality says that for any vectors , , we know:
Exercise 03B-03
Cauchy-Schwarz Triangle
Prove the Triangle inequality using the Cauchy-Schwarz inequality and an expansion of with the dot product.
Exercise 03B-04
Orthogonality identity
Suppose that vectors and satisfy . Show that they must be orthogonal.
Cross product
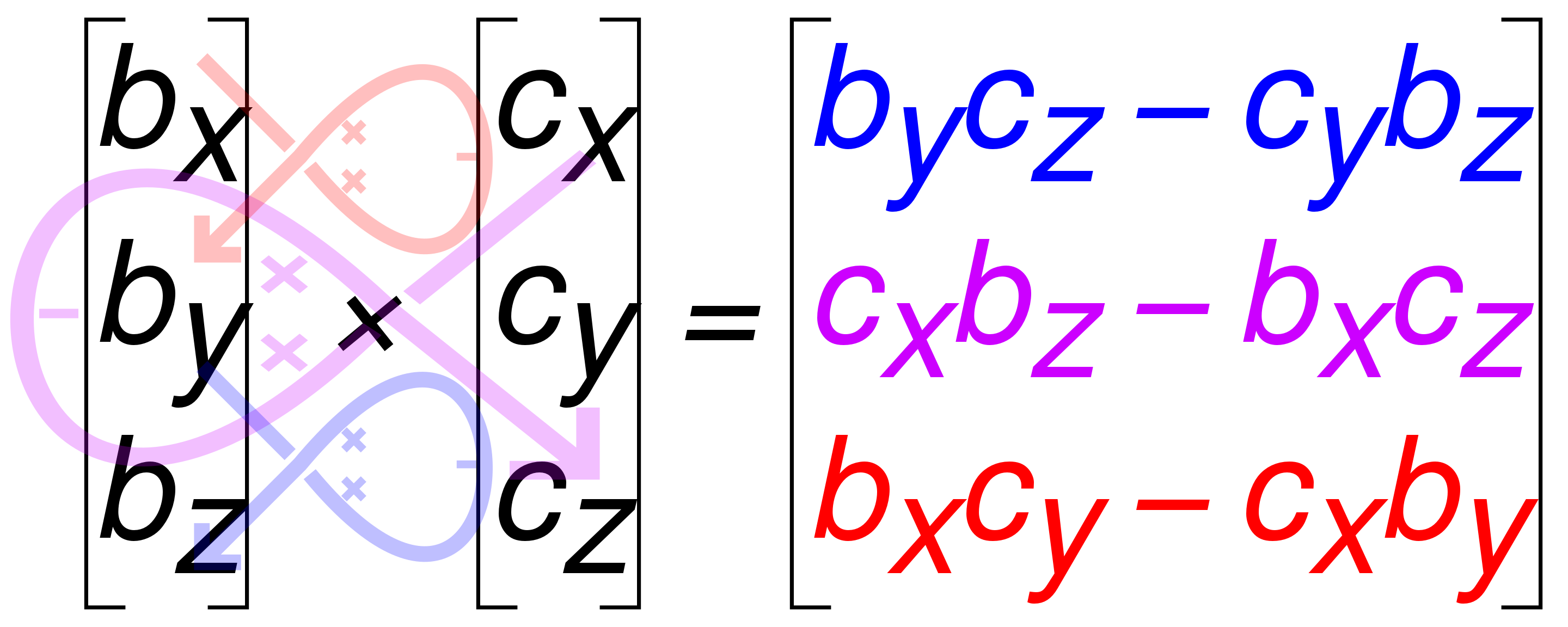
Another product is defined for vectors in called the cross product. It is also called the vector product. The simplest definition is in terms of components:
assuming that and .
There are some mnemonic formulations that can be helpful:
 Or:
“Twist the others, minus in the middle.”
Or:
“Twist the others, minus in the middle.”
Or:
Or:
This is a determinant. The first row of vector entries should be treated as if scalars when taking this determinant.
Exercise 03B-05
Cross products by hand
Let and . Compute in coordinates:
- (a)
- (b)
- (c)
Algebraic properties The cross product is not commutative and not associative. But it does satisfy some relations:
- ( thus )
- ( thus )
- implies for some
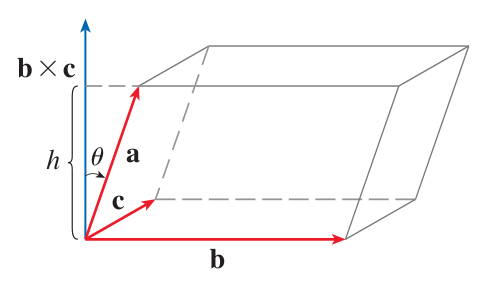
Geometry The norm of the cross product satisfies an angle formula analogous to that of the dot product:
The direction of the cross product is perpendicular to the plane spanned by and it creates a right-handed system when combined with .
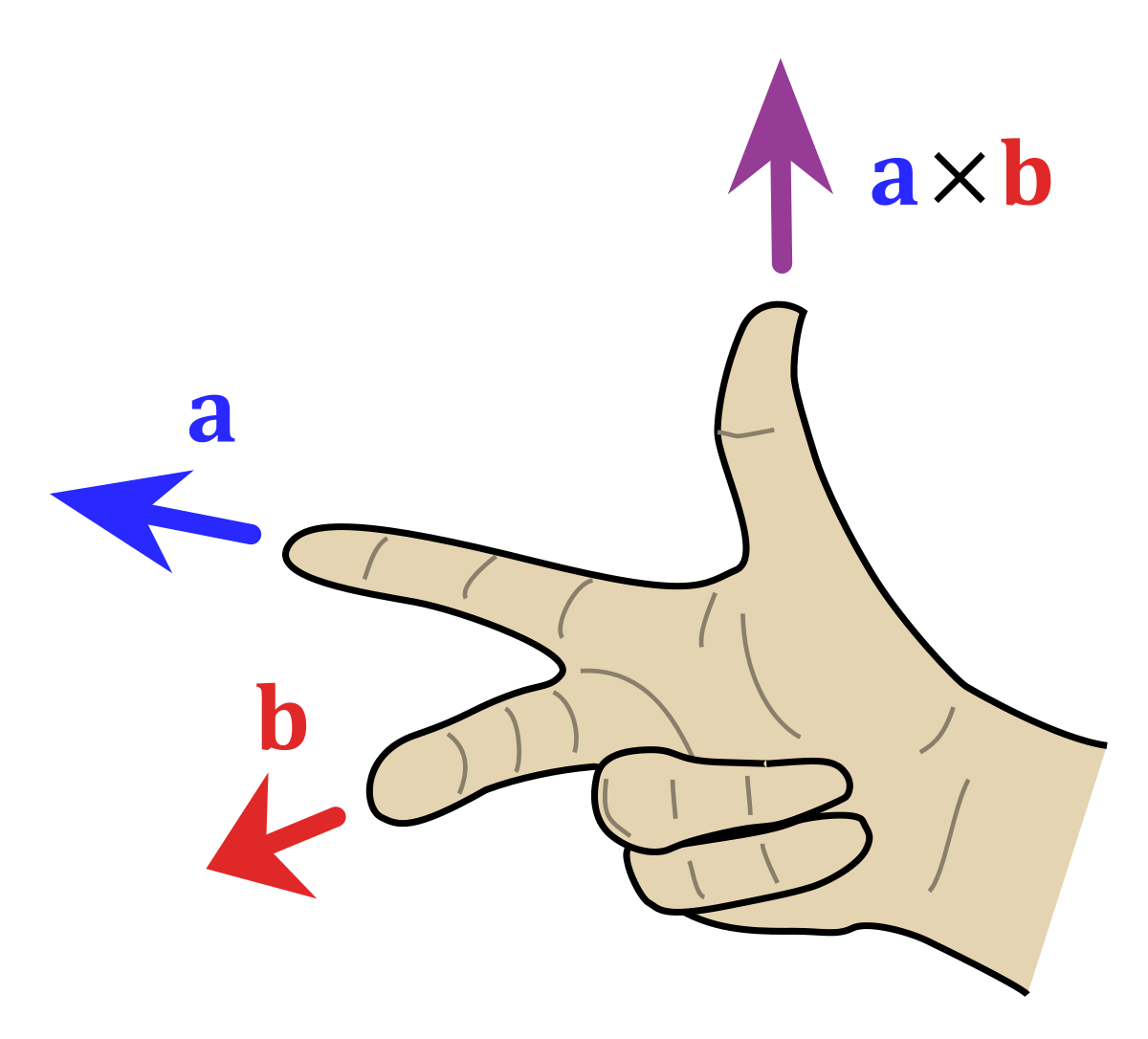 I.e. is right-handed.
I.e. is right-handed.
The norm of the cross product is also the area of the parallelogram formed by .
Exercise 03B-06
Cross product left-handed system
Use the cross product to find a unit vector that is perpendicular to both and such that the triple forms a left-handed system.
Unit vectors
These products are right-handed. Left-handed products include a minus sign, such as .
Exercise 03B-07
Cross product via unit vectors
Compute the cross product of and using the unit vector cross products.
Dot-cross norm identity The dot product and norm of cross product satisfy a simple relationship:
This identity follows quickly from the angle formulas for dot and cross products.
Triple products
There are some general facts about products taken with three or more vectors.
Dot-cross triple product Given vectors , , , consider the scalar quantity . By combining the effect of the dot product with the determinant formula, we have a determinant formula for this scalar:
and this formula immediately implies equalities among possible triple products:
(To figure the signs: right-handed triples are equal, and left-handed triples are equal, and right and left differ by a sign.)
The determinant formula also implies a geometric interpretation of the dot-cross product: is the volume of the parallelepiped spanned by , , .
Cross-cross triple product Given vectors , , , we can form the triple product . (One should maybe not try to think about this product geometrically. It does arise in electromagnetism.) There is a useful shortcut called the Lagrange triple product identity for computing this product:
The abnormal order on the right (vector then scalar coefficient) facilitates a famous mnemonic: “Bac–Cab”.
Exercise 03B-08
Jacobi identity
Use the Lagrange triple product identity to prove the Jacobi identity:
Non-associativity
While the cross product is not associative, the difference has a simple expression using the dot product:
This identity can be proved using the Lagrange triple product identity.
Geometric applications of vectors
Lines and planes
Lines Given a point identified with a vector and a direction vector , the line through in direction is given parametrically by the formula:
Given two points and , the line passing through these two points is given parametrically by:
The line segment from to corresponds to . The point may be considered to be a weighted average of and with weights and .
Planes A plane in can be determined as the points satisfying a single linear equation, such as:
Other formulations of this equation can display more meaning.
A plane is determined in vector form by the data of a single point through which it passes together with a normal vector that is perpendicular to the plane. The equation of the plane can be formed by simply stating that vectors in the plane from are perpendicular to :
If we have components and and , then this formula can be rewritten as:
This equation implies that the , , in the linear equation of the plane are just the components of its normal vector .
Exercise 03C-01
Vector plane from scalar plane
Find the vector equation of a plane with scalar equation .
Exercise 03C-02
Scalar plane from vector plane
Find the scalar equation of a plane passing through and with normal vector . (Start with the vector form.)
Exercise 03C-03
Line and plane intersection
Find the point at which the plane and the line intersect.
Exercise 03C-04
Angle between planes
Find a formula for the angle formed between two planes. Use this formula to find the angle between the planes passing through with normal vectors and , respectively.
Distances
Point to point The distance between and (more accurately, between the point identified by and that identified by ) is .
Point to line The vector from a point to a line , namely to the point on the line closest to , is given by taking the vector from to and removing the component parallel to :
The distance from to is then .
Projection gives minimal distance
One can verify the formula for by minimizing the squared distance from to using the standard calculus technique.
Point to plane The vector from a point to the plane through with normal vector (that is, to the nearest point on the plane) is given by projecting onto , that is:
So the distance from to this plane is:
Plane to plane
Exercise 03C-05
Distance between parallel planes
Find the distance from the plane given by to the parallel plane given by .
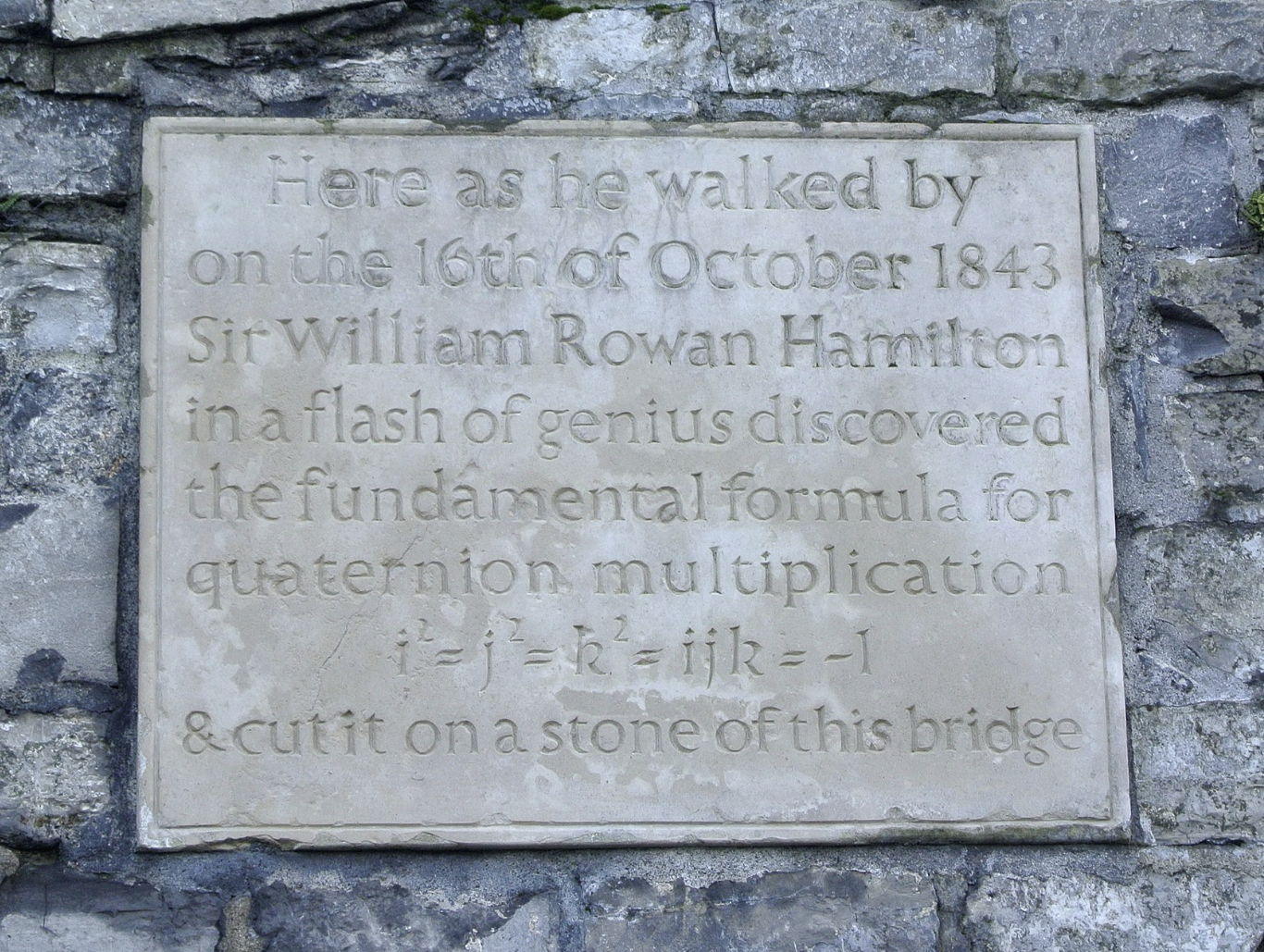
Quaternions
[Optional material.] One can combine 3d vectors and 1d scalers into 4d quantities called quaternions, and written . Quaternions can be added and multiplied and divided.
Quaternions have real number coefficients for each of four basic units:
The coefficient is called the scalar part and the coefficients are together called the vector part of the quaternion.
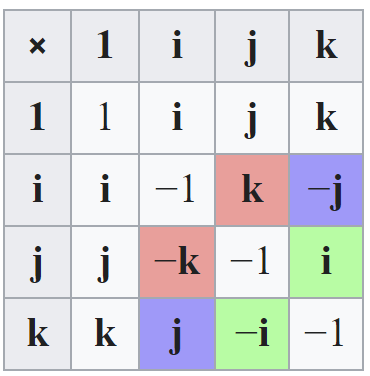
Multiplication rules Multiplication for , , follows the cross product rules (written formerly using etc. instead), with an additional rule for squares:
Using these rules, one can multiply any quaternion sums.
Multiplication charts

If two vector quaternions (with zero scalar part) are multiplied, then the resulting scalar part is the negative dot product, and the resulting vector part is the cross product, of the vector parts considered as vectors using their components.
Quaternions can also be divided:
Problems due 13 Sep 2023, 8:00pm
Problem 03-01
Planes intersection line, parametric
Find a parametric equation for the line formed as the intersection of the two planes and . What is the angle between these planes?
Problem 03-02
Plane perpendicular, two scalar planes
Find a plane that is perpendicular to the two planes given by and , respectively.
Problem 03-03
Distance point to line
Compute the distance from the point to the line given by .
Repeat the problem for and .
Problem 03-04
Distance between skew lines
Find a general formula for the distance between two skew lines, i.e. lines in space which are not parallel and do not intersect. (Assume they are given parametrically in vector form.)
More problems
Also do 6 exercises from List A and 7 exercises from List B.